Una novetat en el camp de la tecnologia robòtica, construeix un mapa de la sala i determina la millor ruta de moviment. A causa d’una trajectòria de moviment més òptima, es redueix el temps dedicat a la neteja sense pèrdues de qualitat. La velocitat es pot comparar amb la velocitat d’un aspirador estacionari. A la revisió, considerarem els avantatges, els desavantatges i la funcionalitat de l’aspiradora, descobrirem detalladament en què es diferencia de les seves contraparts i per què val la pena triar aquest model.

Especificacions

- Pes - 3700 g.
- Diàmetre 34 cm, alçada 9,9 cm.
- Alimentat per una bateria Li-lon de 2600 mAh.
- Potència 24 W.
- Càrrega automàtica a l'estació d'acoblament.
- El temps necessari per carregar és de 180 minuts.
- Funcionament autònom de la bateria durant 2 hores.
- El so durant el funcionament no supera els 65 dB.
- Maneja fins a 150 metres quadrats de superfície.
- El volum del contenidor de recollida és de 350 ml.
- Es controla mitjançant un control remot o una aplicació en un telèfon intel·ligent.
- Sistema de navegació: lidar, para-xocs mecànic, sensor d'alçada IR, sensor de detecció d'obstacles.
- Alertes de so i llum.
Disseny

El disseny és estàndard: una caixa rodona amb elements de control a la part superior i elements de treball a la part inferior. El model també té les seves pròpies característiques. Es distingeix per un para-xocs, darrere hi ha un telemetre IR per crear un mapa de la sala. També hi ha sensors per a canvis d’alçada i objectes tàctils.
El cos és de color mat, de color taronja fosc, mentre es condueix es pot veure clarament a l’habitació. A la part superior hi ha plàstic tintat transparent, al centre hi ha un sistema de control format per botons tàctils agrupats en vuit. Aquest sistema de control us permet començar a treballar o aturar el moviment. També hi ha indicadors que mostren la càrrega de la bateria, els errors i l’hora actual. Tots ells es destaquen en taronja brillant.
Es distingeix pel model i el nombre de rodes: un parell de rodes de suport i un parell de rodes motrius, una roda motriu a la part davantera, la segona a la part posterior del contenidor de brossa. Les rodes estan situades en el mateix diàmetre amb un cercle, poden fer un gir complet al seu lloc. Muntatges de rodes en frontisses de molla amb recorregut de 26 mm. Un para-xocs mecànic amb moll recorre tota la part frontal.

A més de la indicació de llum, també hi ha alertes sonores que no es poden desactivar. Les vores del cos estan bisellades a la part inferior per millorar la flotació. També hi ha certa angularitat a la part superior per millorar el pas per sota dels mobles. No hi ha cap mànec de transport a la caixa.
El col·lector de pols és de plàstic transparent, però això no fa visible la seva cavitat des de l’exterior; quan s’omple de pols, és difícil determinar-ne la quantitat a través del plàstic. Es desconnecta el contenidor prement el pestell de la part posterior. La neteja és ràpida i senzilla, la part inferior i la cortina es tornen a doblar amb un gran angle, cosa que permet obrir el filtre i tot el contenidor del compartiment de deixalles.
A la part interna hi ha dos petits elements de filtre addicionals, però el flux principal no passa per ells, sinó pel filtre principal principal, que recull la major part de la pols. El filtre gran es pot desmuntar, consta de dues meitats, una amb una malla fina de plàstic i l’altra amb un filtre de material fibrós.S'inclou un ventilador d'aire al col·lector de pols, que es pot treure fàcilment, de manera que el recipient es pugui rentar amb aigua, però després d'això s'ha d'assecar bé abans d'utilitzar-lo.
A la part inferior hi ha els raspalls principals, el compartiment amb ells està unit a una frontissa amb un traç de 6-7 mm, repeteixen el relleu del terra. Per a la neteja, es retira el raspall de les ranures. Al costat dret hi ha un botó per apagar l’alimentació del robot. A més de rodes i escombretes, hi ha coixinets de contacte a la part inferior per connectar-se a l'estació d'acoblament. La pròpia estació de càrrega és prou gran i té un pes considerable. Consta de dues parts; s’apliquen coixinets de goma antilliscants a la part inferior de la part inferior. És bastant estable i poques vegades es mou quan el robot hi està muntat per reposar la càrrega.
Funcional
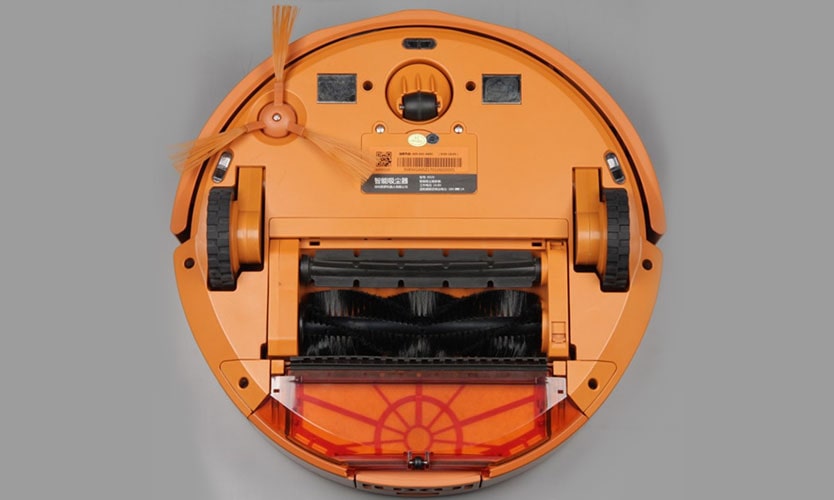
L’algoritme de recollida d’escombraries segueix aquests passos: un raspall lateral arrossega les deixalles fins al centre, on un raspador de goma mou grans deixalles cap a l’obertura de succió i un raspall amb truges en recull grans i petites. Hi ha dents a la vora de la solapa de succió que eliminen les restes de les truges del raspall. El segon pas de la neteja: les restes que queden al terra després del pas dels raspalls s’aspiren a la bretxa entre els rascadors de goma de la secció inferior del col·lector de pols, on s’assenten al filtre. Aquest algorisme de treball fa que el robot s’acosti a les aspiradores clàssiques, ja que algunes de les deixalles s’aspiren des de la mateixa superfície del terra.
L'aspirador no és adequat per recollir líquids ni treballar en una habitació humida, després de contactar amb la humitat, deixeu immediatament de treballar i asseceu-lo bé. El sistema de navegació del model es basa en un lidar, a diferència dels seus homòlegs, aquest robot no ha de conduir a prop d’un obstacle per determinar-lo. La identificació d’elements interiors i parets a distància permet al robot construir un mapa de la sala i la ruta òptima de moviment.
L'aspirador sempre determina amb exactitud la seva pròpia ubicació i la ubicació de la base, si es va iniciar a partir d'ella. L’electrònica recorda els llocs per on ja ha passat l’aspiradora, els llocs on encara cal fer neteja, les zones inexplorades. Les persones o animals que es mouen a prop no interfereixen en l'algoritme de moviment del robot. L’inconvenient d’utilitzar el lidar és l’alçada de la seva ubicació: només veu aquells objectes que estan per sobre de la línia de la instal·lació, tot el que hi ha a sota no determina. Per a obstacles tan baixos, el cos està equipat amb un para-xocs mecànic.
Els models estan disponibles en tres modes principals de funcionament:
- Automàtic. Treballeu fins que la bateria es descarregui completament i torneu a la base per reposar la càrrega.
- Local. S’utilitza per netejar una zona específica. La instal·lació a la zona requerida es fa manualment. Podeu especificar l'àrea requerida al mapa.
- Programat. Fins i tot podeu programar diversos horaris, que indiquen l’hora i els dies de neteja.
El sistema de control està implementat en tres versions:
- Mitjançant els botons de control del tauler tàctil. Aquí podeu veure el mode de neteja actual, el temps, el nivell de bateria, els possibles errors de funcionament.
- Des del comandament a distància. Consta de dos botons: comenceu en mode automàtic i torneu a la base. El control només es realitza en el camp de visibilitat del dispositiu.
- A través de l’aplicació al telèfon mòbil. Aquest mètode ofereix la funcionalitat més àmplia. Aquí podeu veure tota la història de l'activitat de l'aspiradora, la construcció d'un pla de treball i la trajectòria, fer un seguiment de les zones en què es va dur a terme la neteja, en les quals només està prevista. L'únic inconvenient és l'absència de l'idioma rus a la funcionalitat de l'aplicació.
Equipament

- Font d'alimentació.
- Estació de moll.
- Raspall lateral de recanvi.
- Filtre de recanvi al contenidor de recollida d’escombraries.
- Control remot.
- Aspiradores.
- Instrucció.
Avantatges i inconvenients

Després d’haver estudiat la funcionalitat proposada, podem destacar els següents avantatges del model:
- Disseny original i cridaner.
- Estructura interna optimitzada del contenidor de pols.
- Construint un mapa de les habitacions.
- Velocitat de neteja.
- Programació de neteja programada.
- Alentiment del moviment davant dels elements interiors, per la qual cosa la probabilitat de danyar-los és mínima.
- Connexió a una aplicació mòbil.
- Bon paquet de lliurament.
I aquests inconvenients:
- Deixa restes al llarg de les parets.
- El disseny del contenidor de residus és complex, tot i que es considera millorat.
- No detecta cables al terra.
- Cost bastant elevat: uns 28.000 rubles.
- Manca de rus a l’aplicació.
Vegeu també: aspiradores de fins a 25.000 rubles
